یکی از چالشهای کاربرد هوش مصنوعی در جراحی، کمبود دادههای برچسب گذاریشده است و این کمبود باعث میشود که نتوانیم بسیاری از تسکهای مرتبط با این موضوع را با دقت خوبی به سرانجام برسانیم.
پژوهشگران ایتالیایی و انگلیسی اما از این فرصت استفاده کردند و با روش self-supervised (خودنظارتشده) اقدام به حل این مسئله کردند.
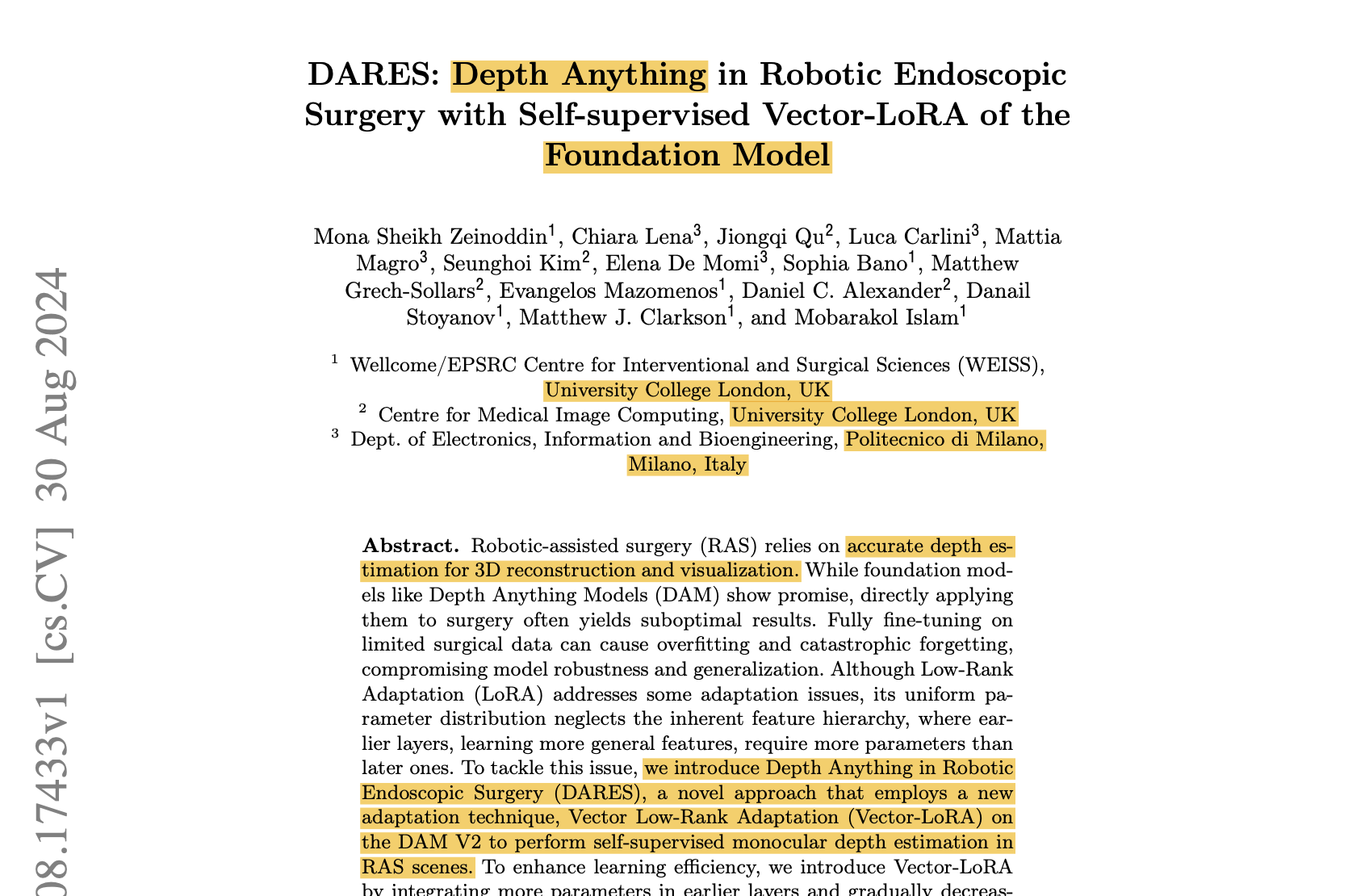
این پژوهشگران در مقالهای که حدودا ده روز پیش منتشر کردهاند (لینک) روشی [به نام مخفف DARES] را برای بهبود دقت جراحیهای رباتیک ارائه کردهاند که در واقع تکنیک جدیدی (Vector-LoRA) بر روی مدلهای DAM یا Depth Anything Models است و میتواند تخمین عمق را توسط دید تکچشمی را بهبود قابل توجهی ببخشد.
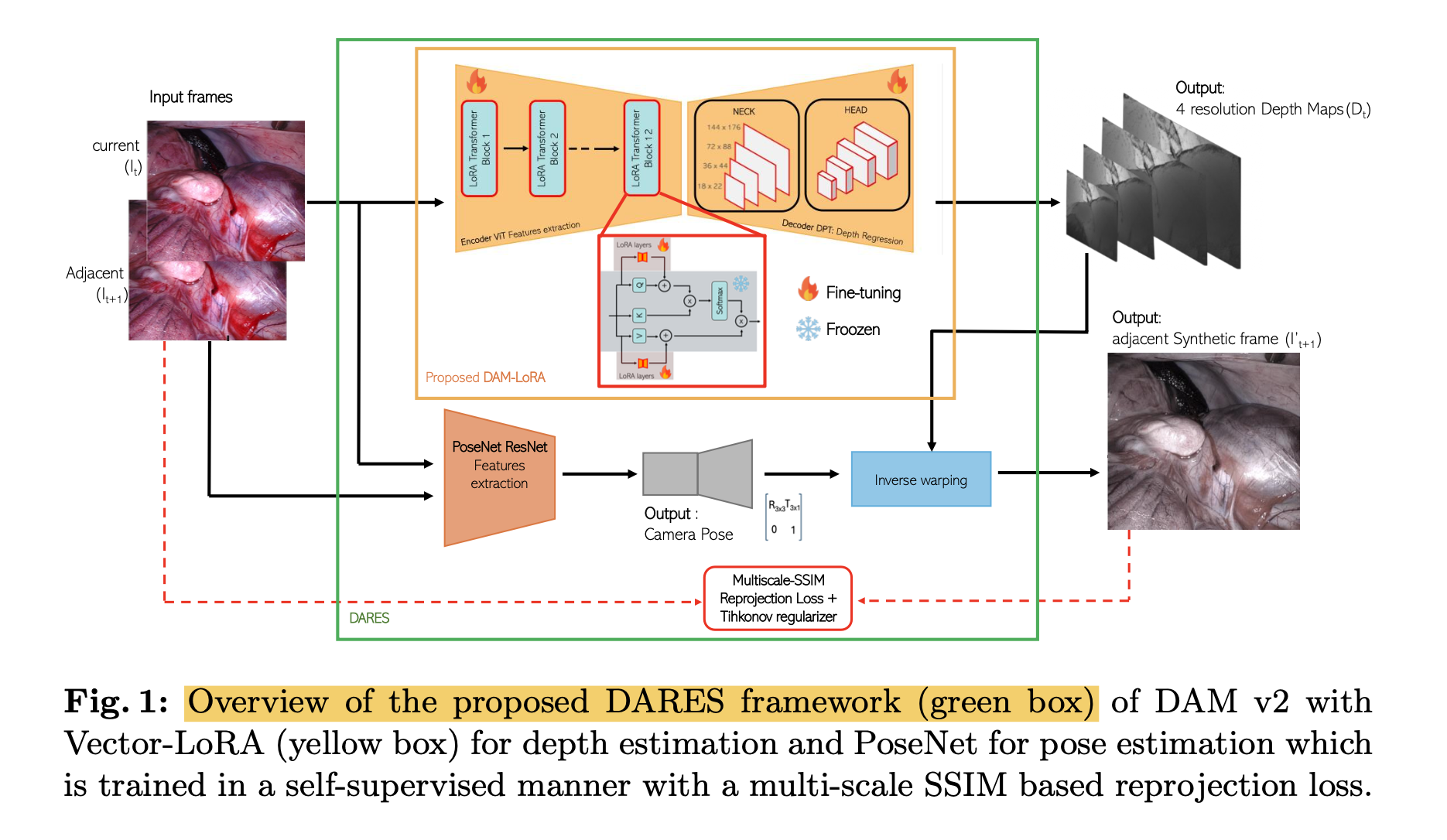
در تصویر زیر میتوانید کلیت کار این پژوهشگران را [در مربع سبزرنگ] مشاهده کنید.
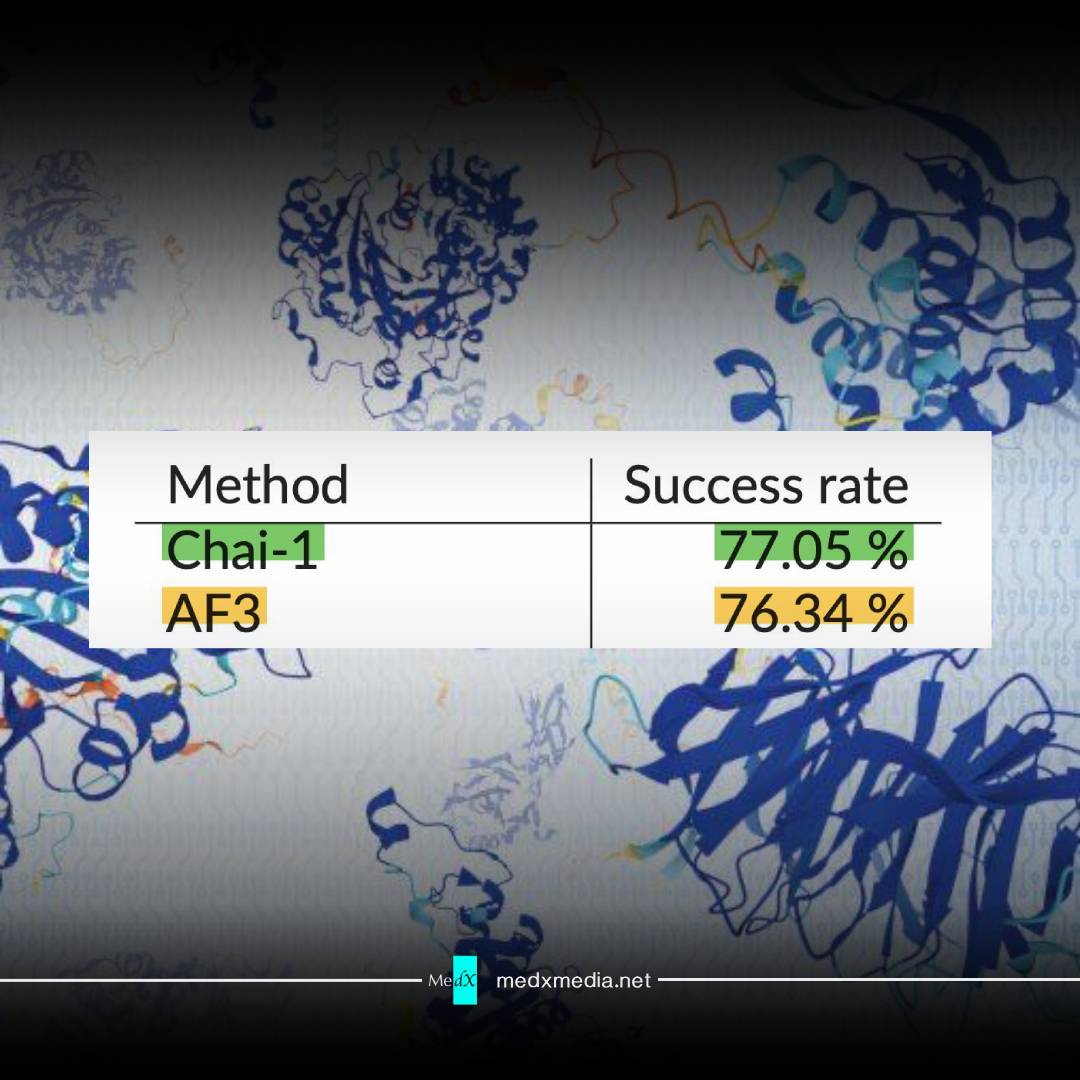
در جدول زیر هم میتوانید مقایسهای از عملکرد مدلهای «تخمین عمق همهچیز» (DAMs) در گذشته و پس از استفاده از تکنیک معرفیشده توسط این پژوهشگران را مشاهده کنید.
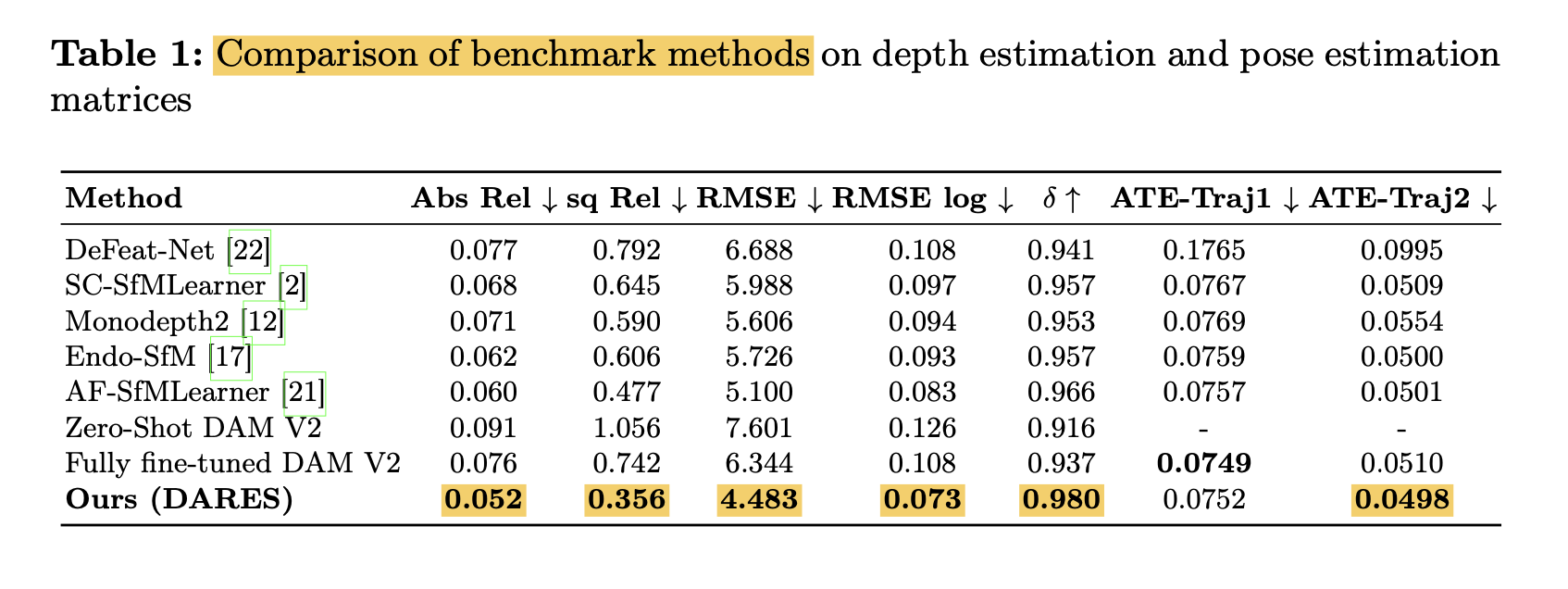
کاری که این پژوهشگران انجام دادند در واقع فراتر از صرفا معرفی یک تکنیک بود و آنها نشان دادند که صرف fine-tune کردن مدلهای پایهای برای تخمین دقیق عمق فایدهی زیادی ندارد و استراتژی adaption استفادهشده در آنهاست که حائز اهمیت بسیار زیادی است و با تغییر آن نشان دادند که تا چه میزان میتوان دقت عملکرد این مدلها را افزایش داد.
درضمن آنها کدها و وزنهای مدل pre-trained را به صورت open-source در گیتهاب (لینک) قرار دادهاند.
امید است با پیشرفت هرچه سریعتر هوش مصنوعی در جراحی شاهد کاهش خطاها و افزایش کارایی متخصصان این حیطه باشیم.